
Flat sheet Actuated Scurrying Tetrapod
multi-material assembly / robotics / sensors / actuation
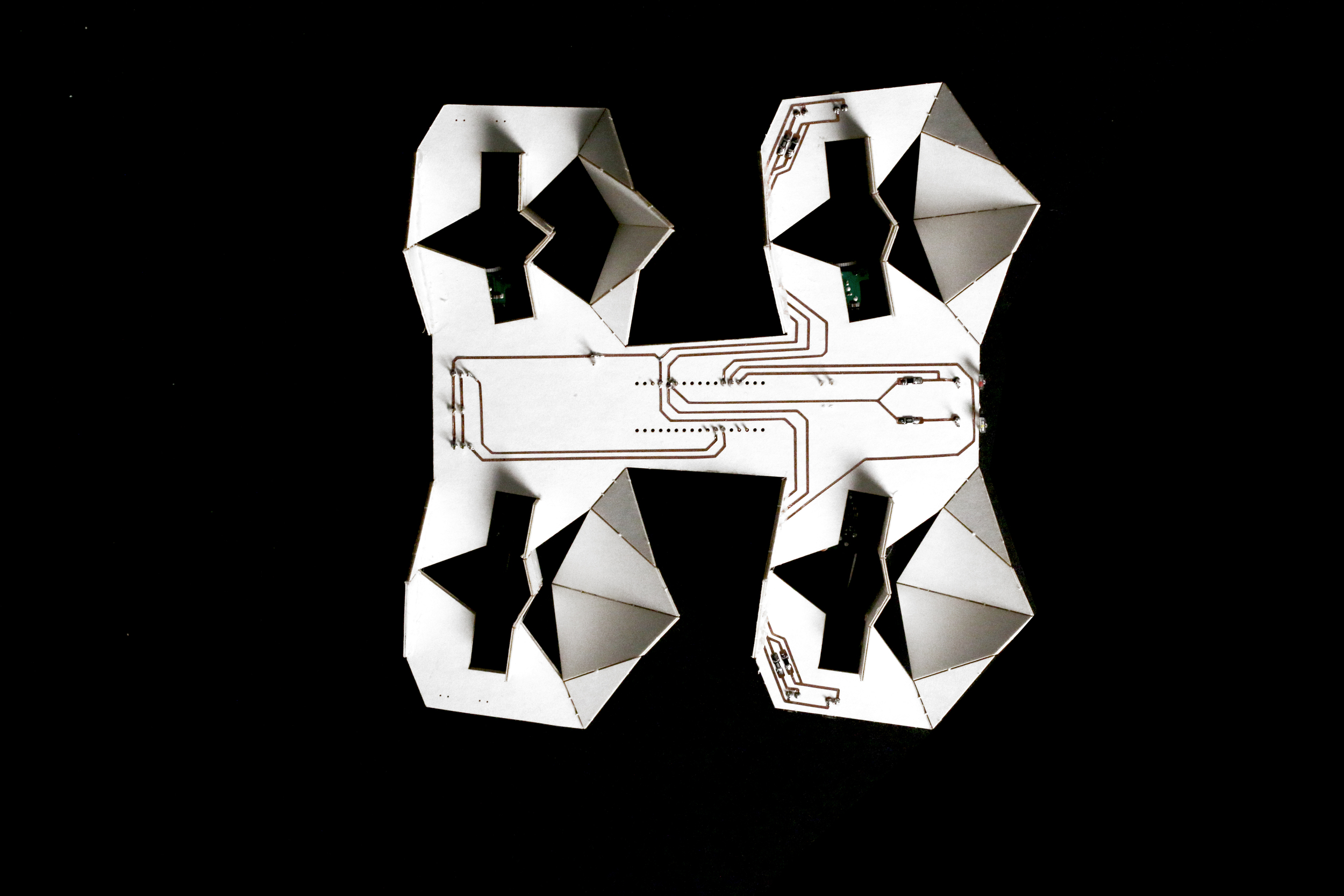
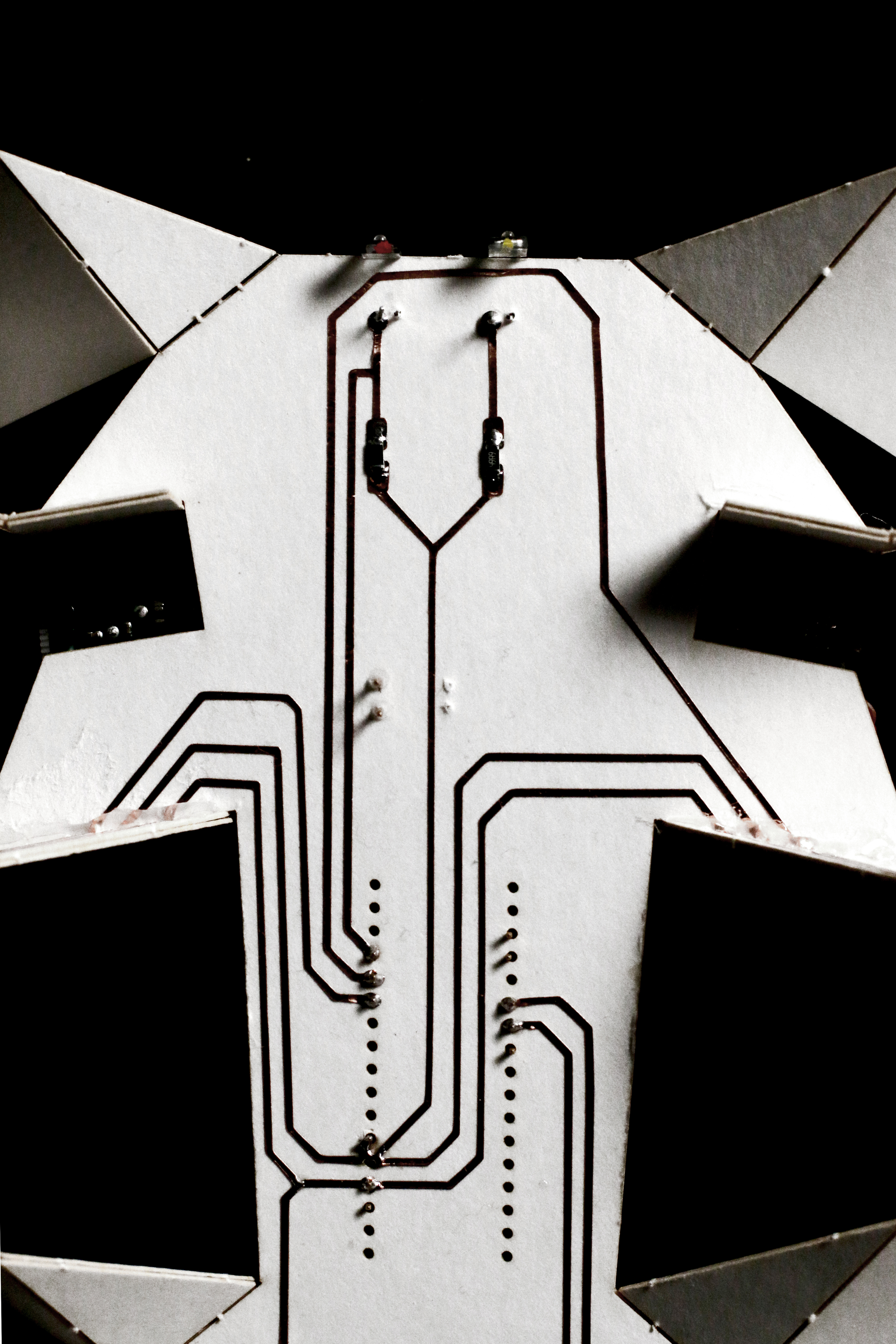
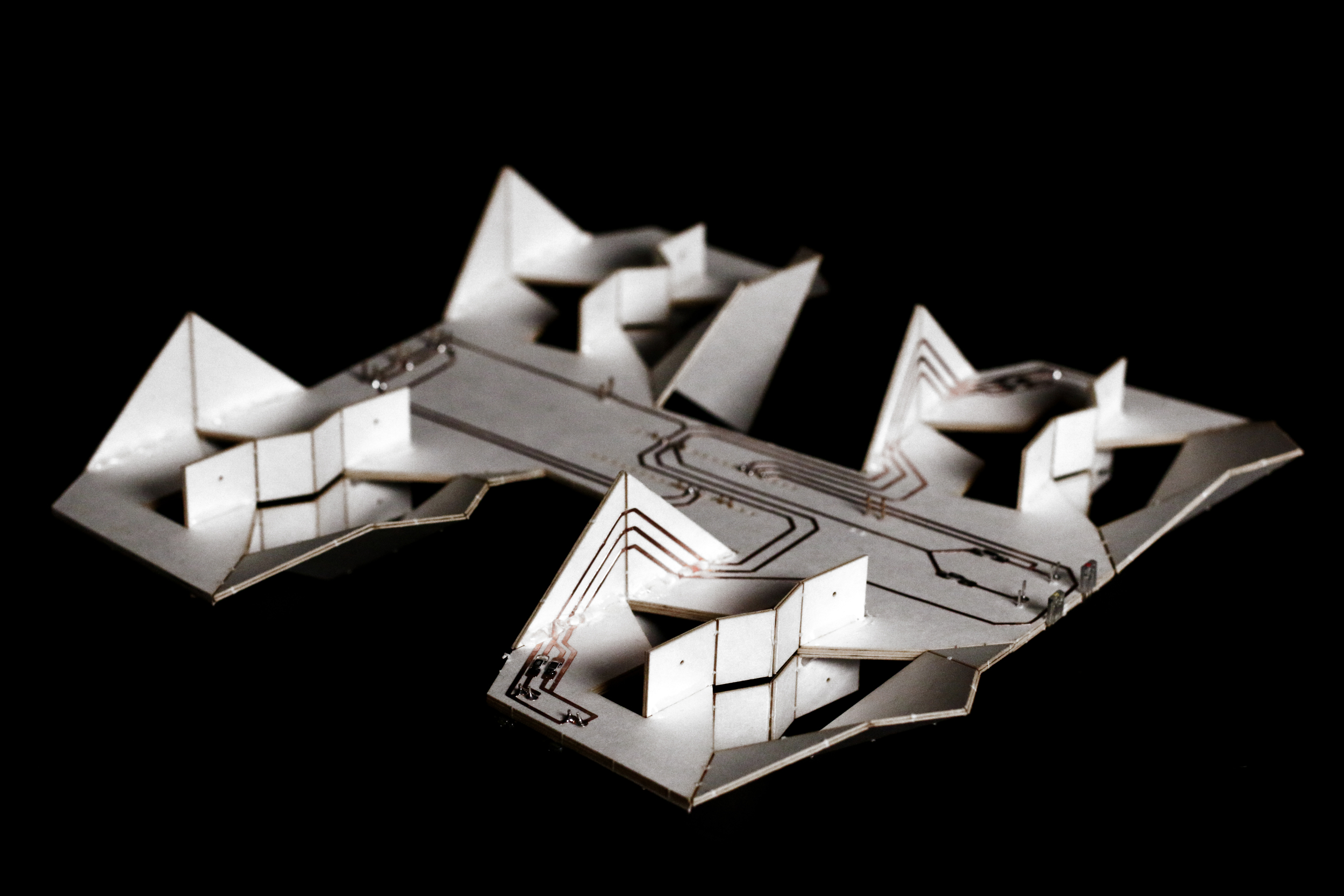
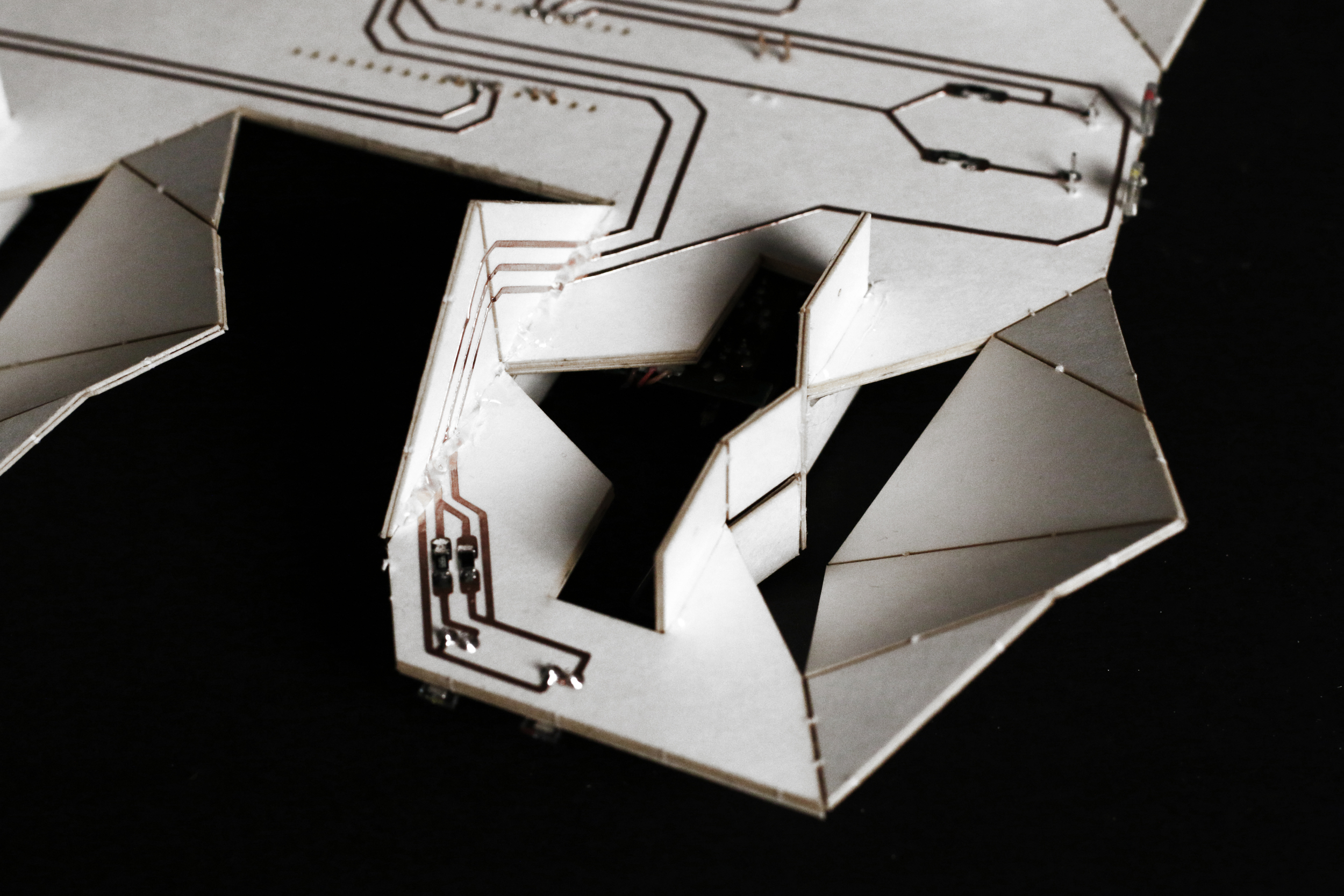
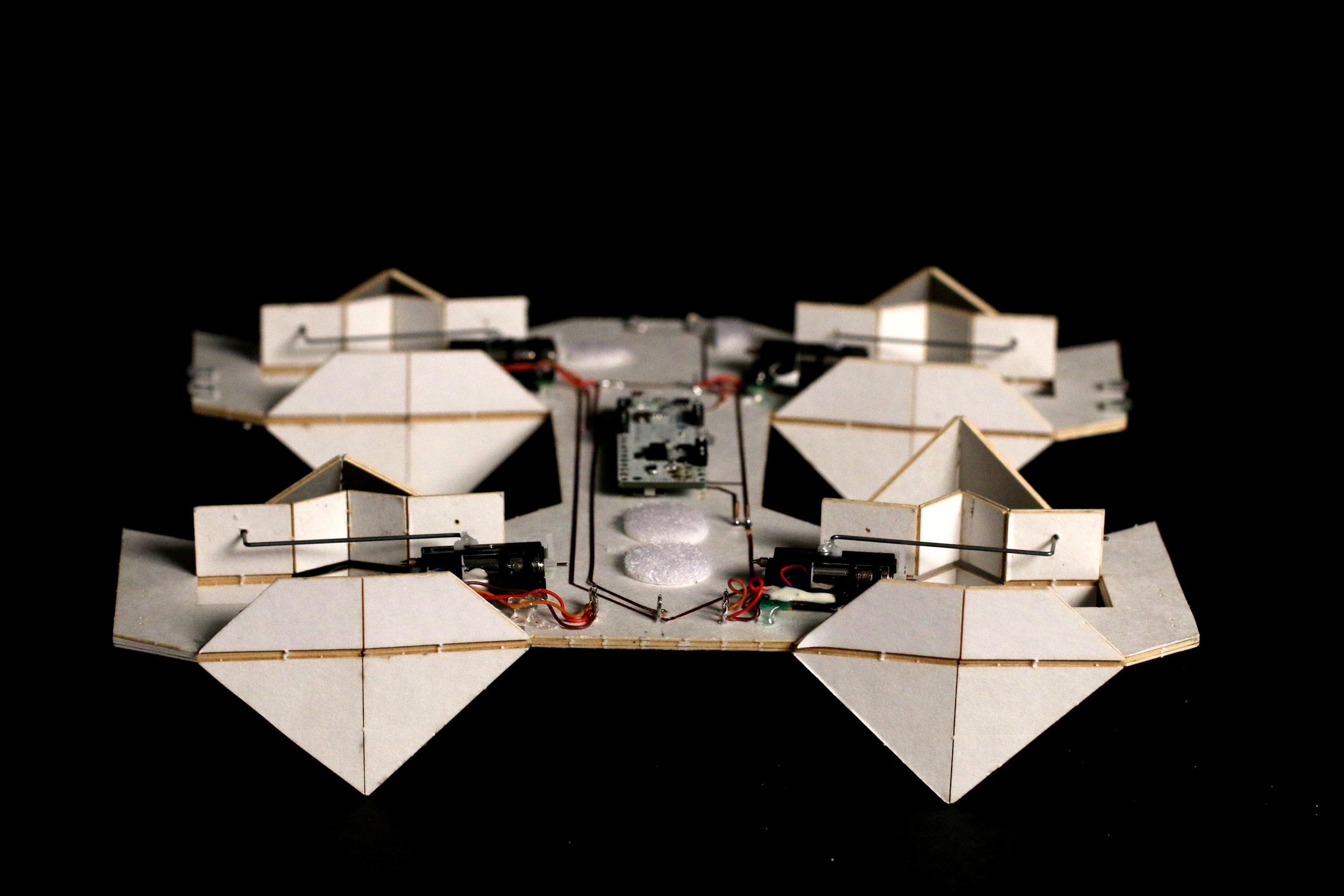
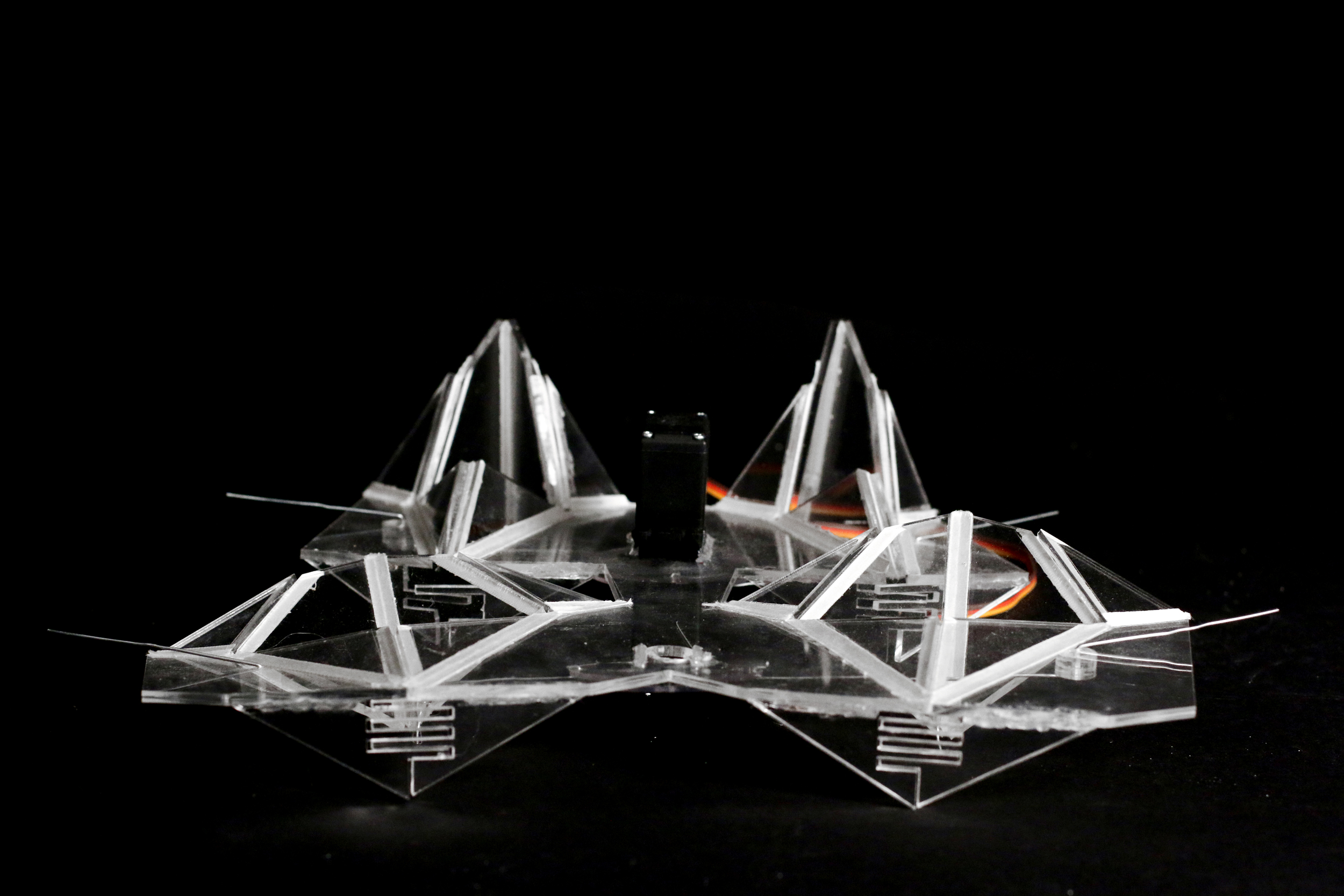
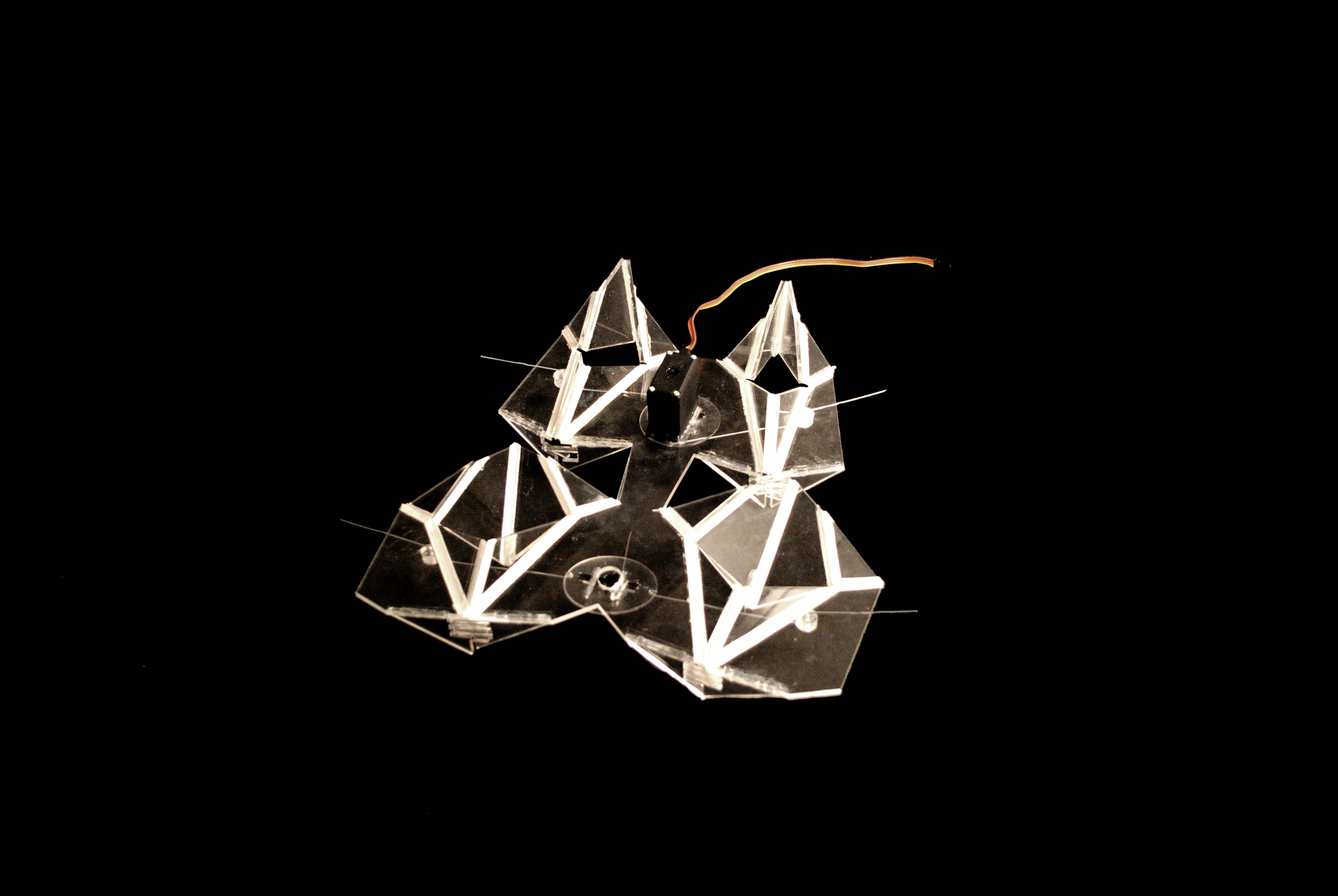
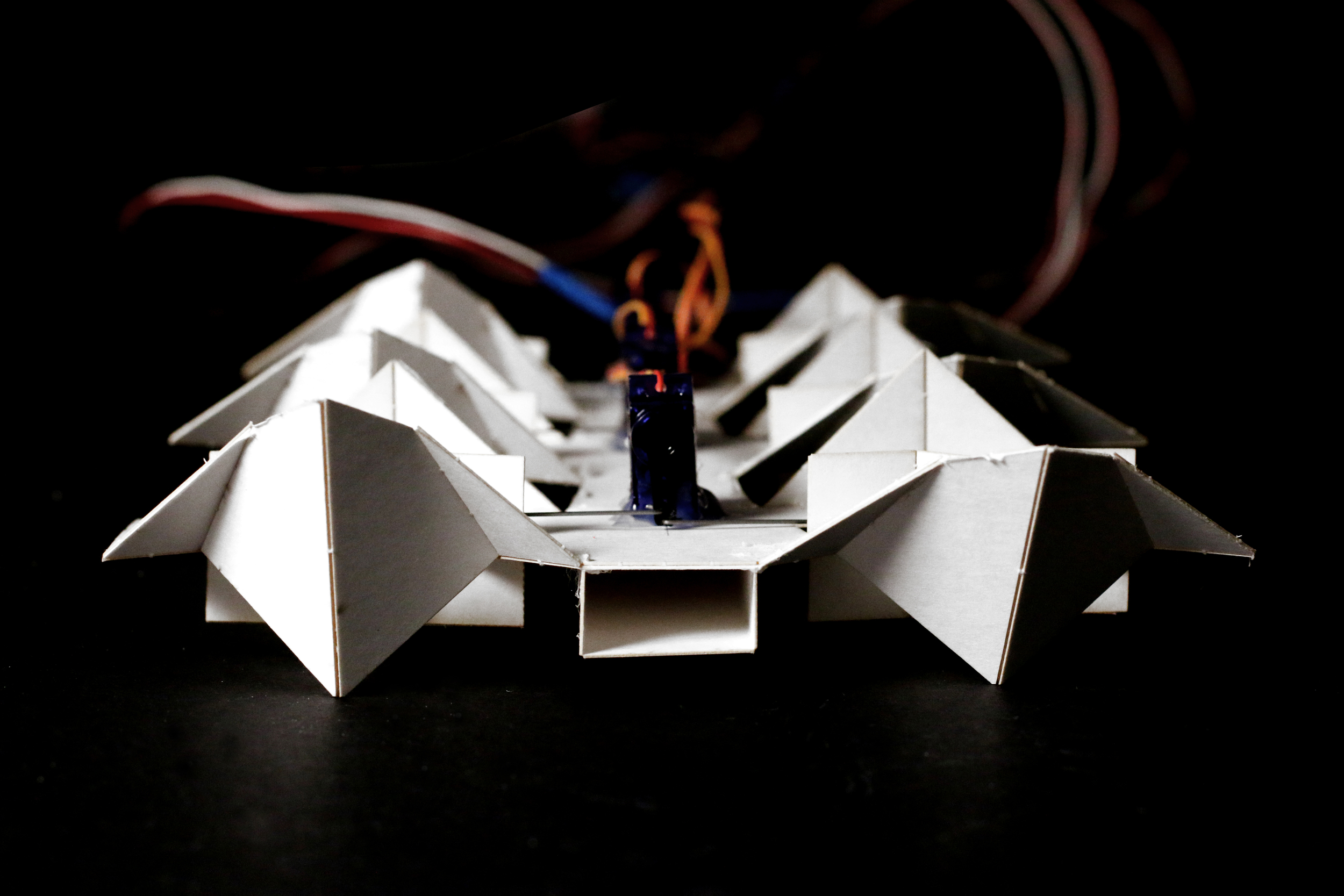
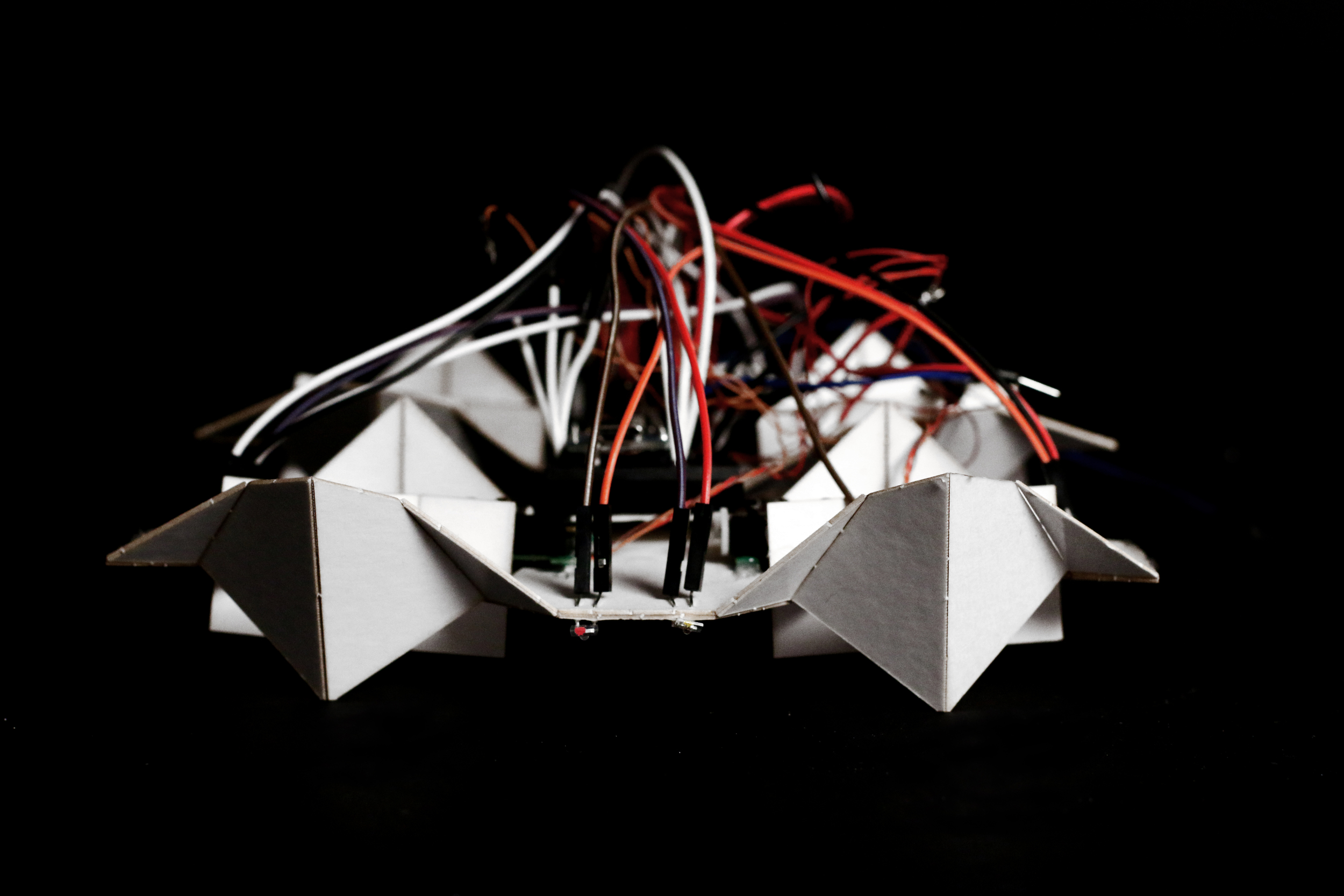
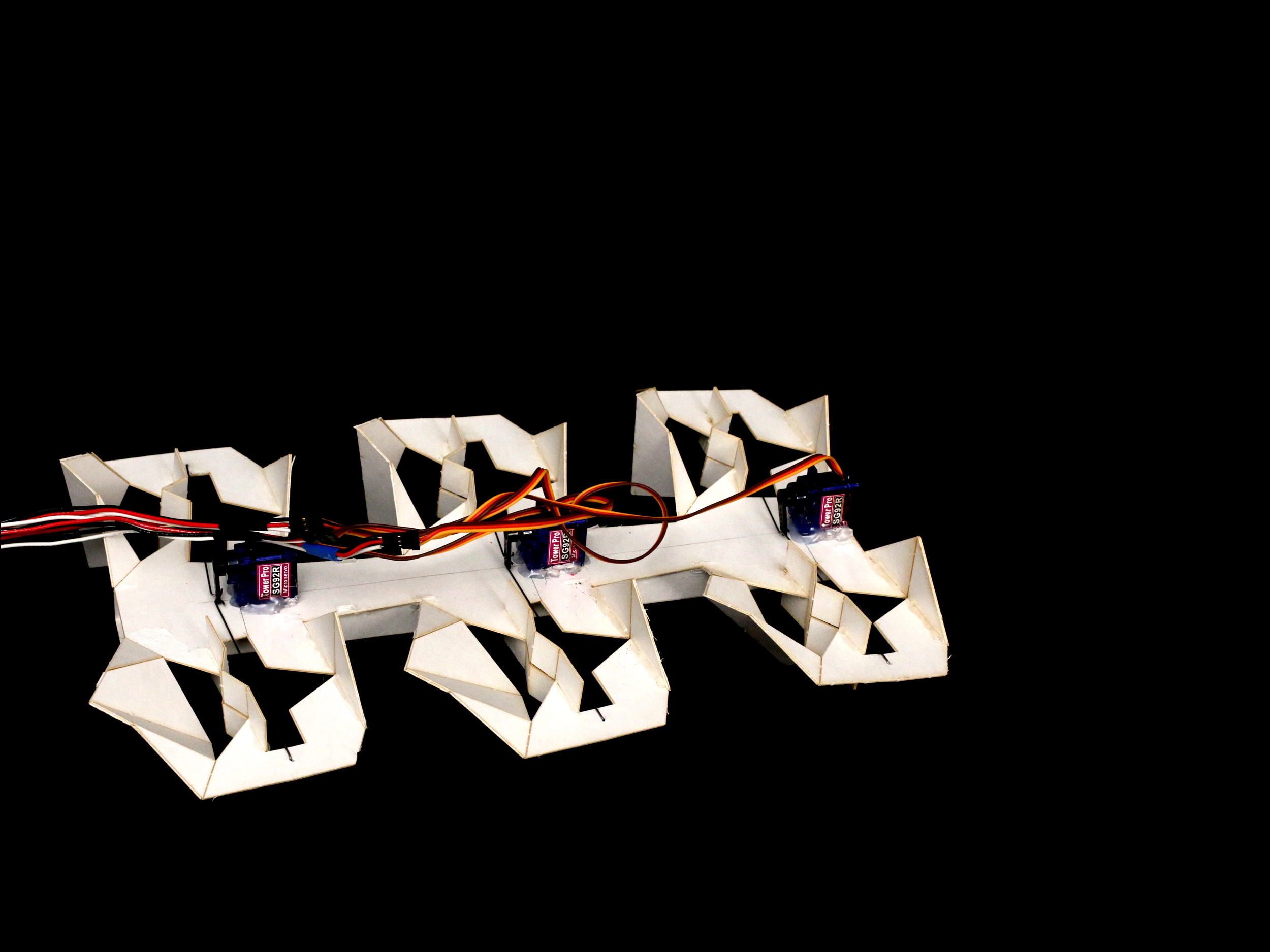
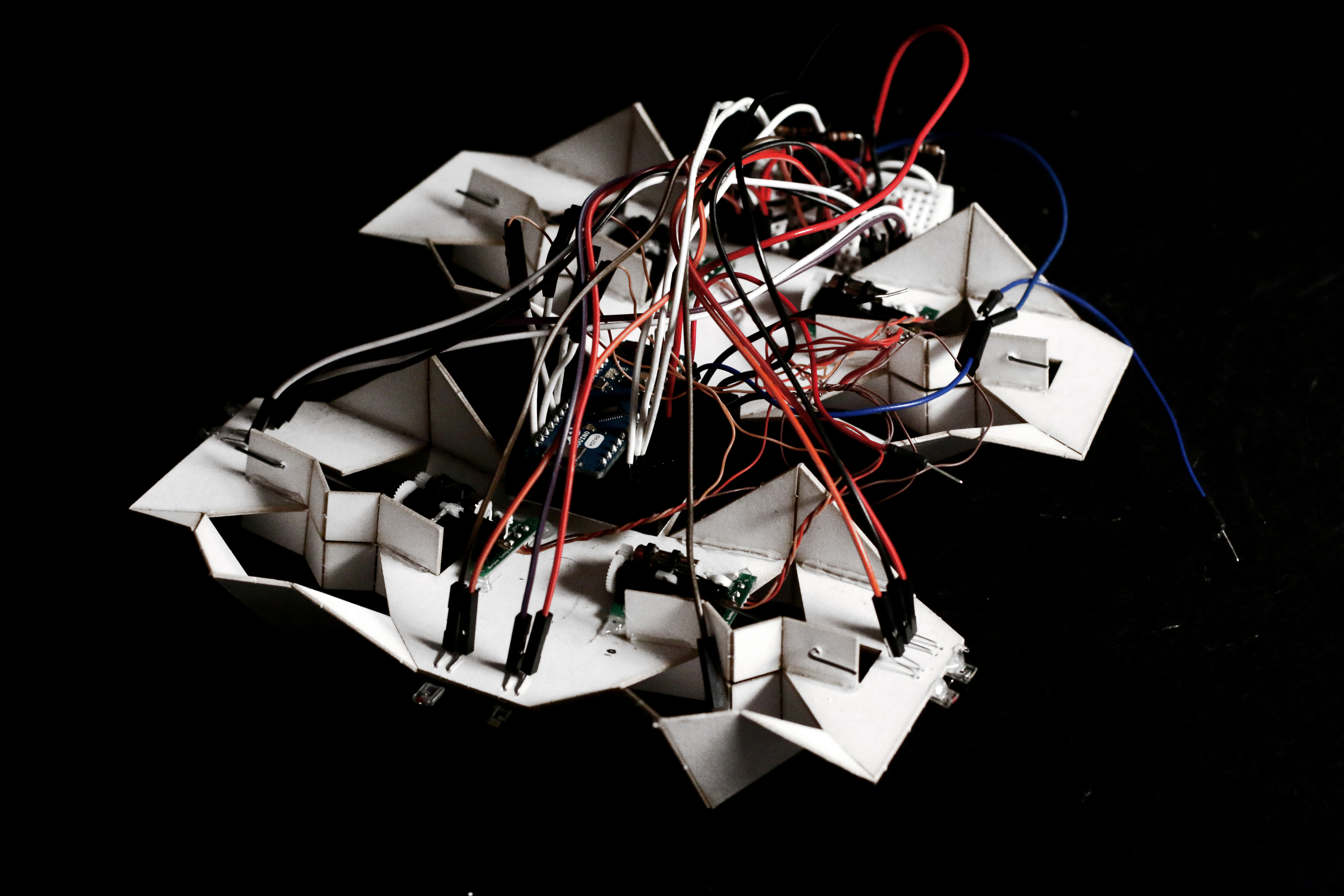
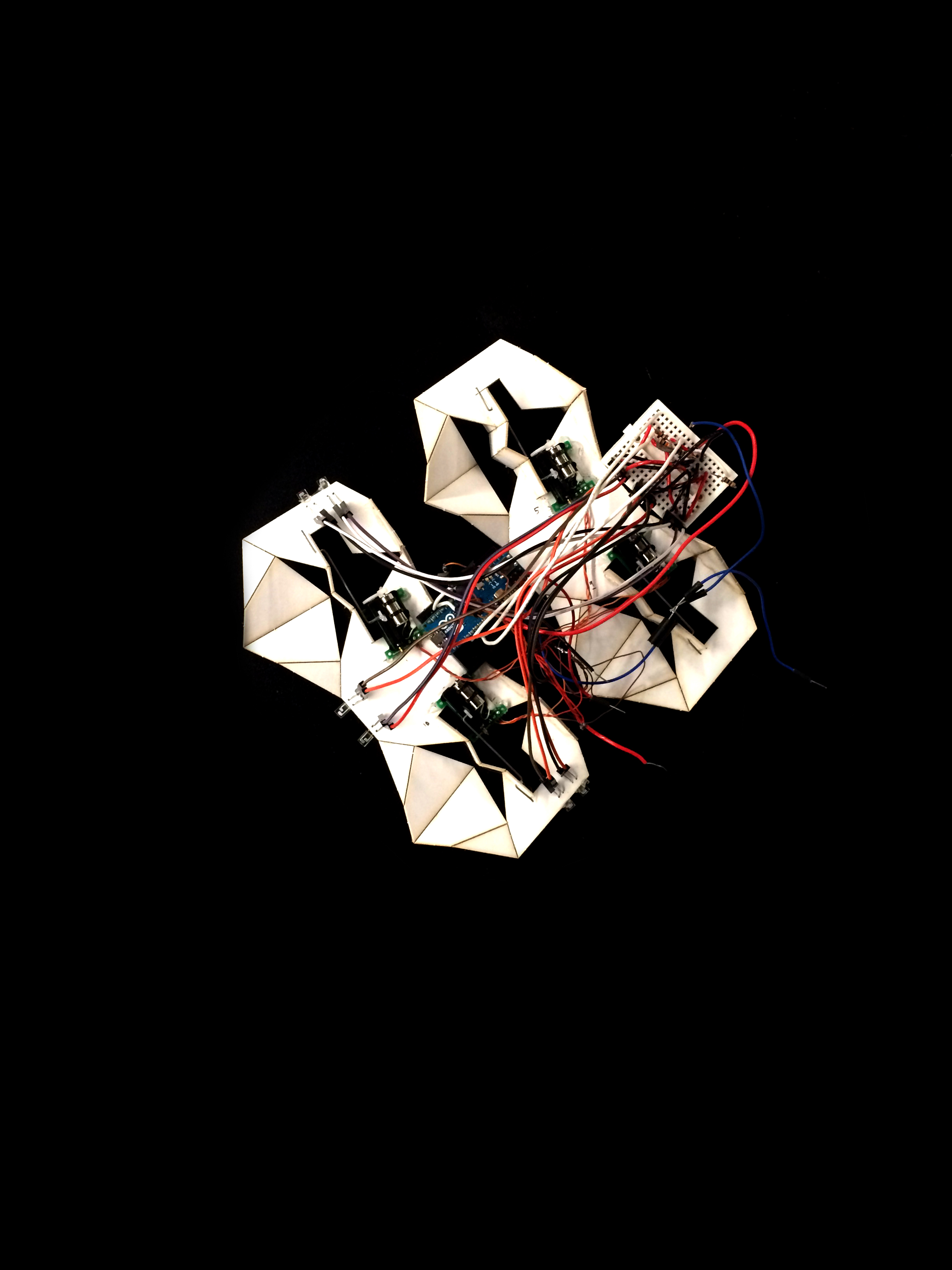
F.A.S.T is a walking robot which utilizes a modular leg unit connected to a rigid body. This modular leg is derived from an origami folding pattern and uses a spherical linkage folding mechanism. Four legs complete the current assembly which is constructed using a lamination technique. Our robot is built up from thirteen flat sheets of different materials which are laminated and then folded into place. This fabrication technique takes advantage of widely available lasercutters and cheap materials to produce a robot that is extremely thin, flexible, and structurally robust. The design of the assembly is focused on reducing complexity of actuation while achieving the ability to autonomously navigate a given environment. FAST achieves forward or backward movement due to a slow, then fast gait which makes static friction with the foot and ground greater than the opposing dynamic friction. Turning is achieved by varying the timing of each foot strike. The ambulatory behavior is reminiscent of a small animal or insect moving hurriedly with short quick steps, which is why we have used the descriptor ,"scurrying". The electronics and batteries are all housed on the underside of the rigid center allowing for a streamlined visual appearance and capacity for expansion.
Team: Spyridon Ampanavos and Jacob Hamman - Harvard University Graduate School of Design "Informal Robotics" - Professor: Chuck Hoberman

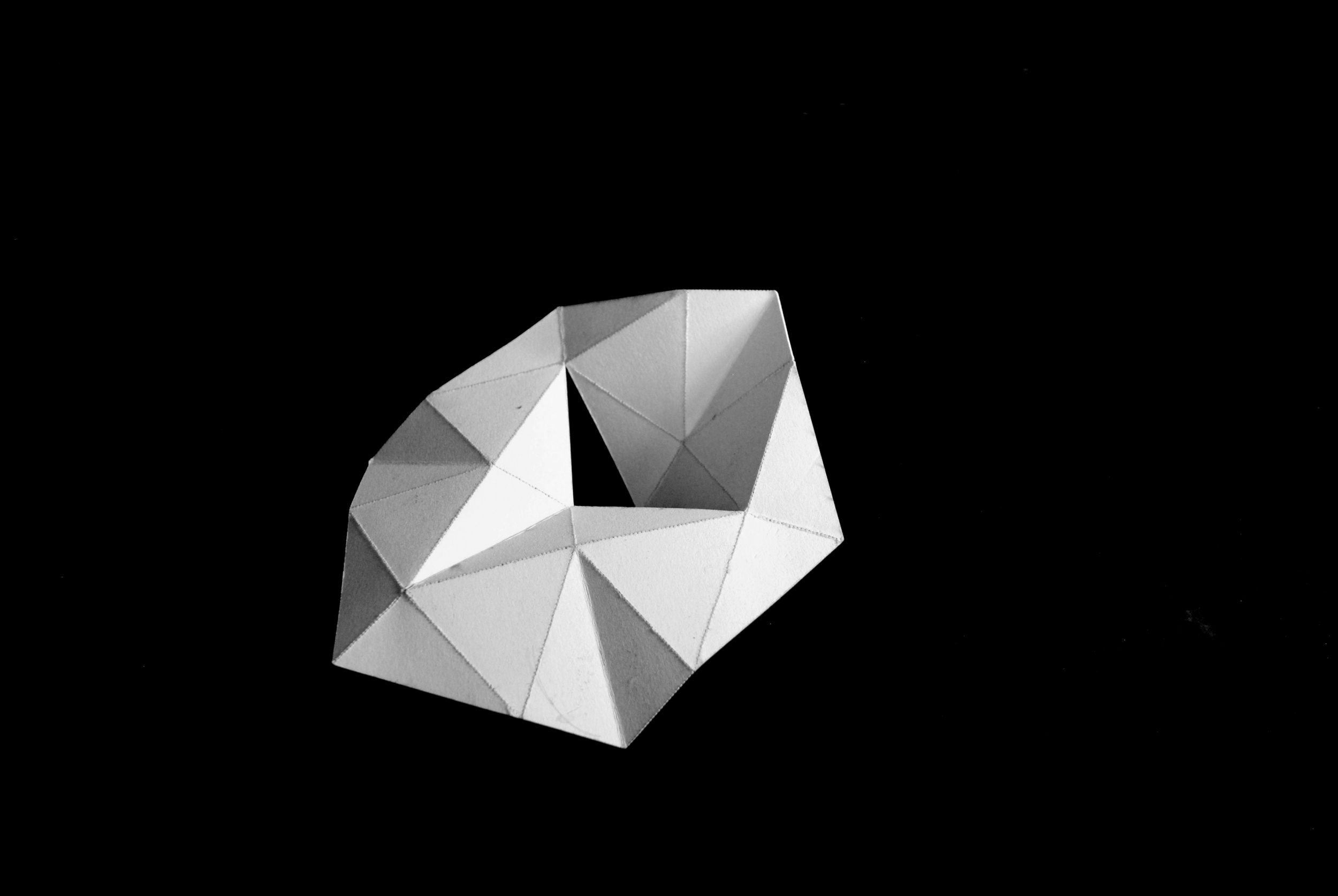
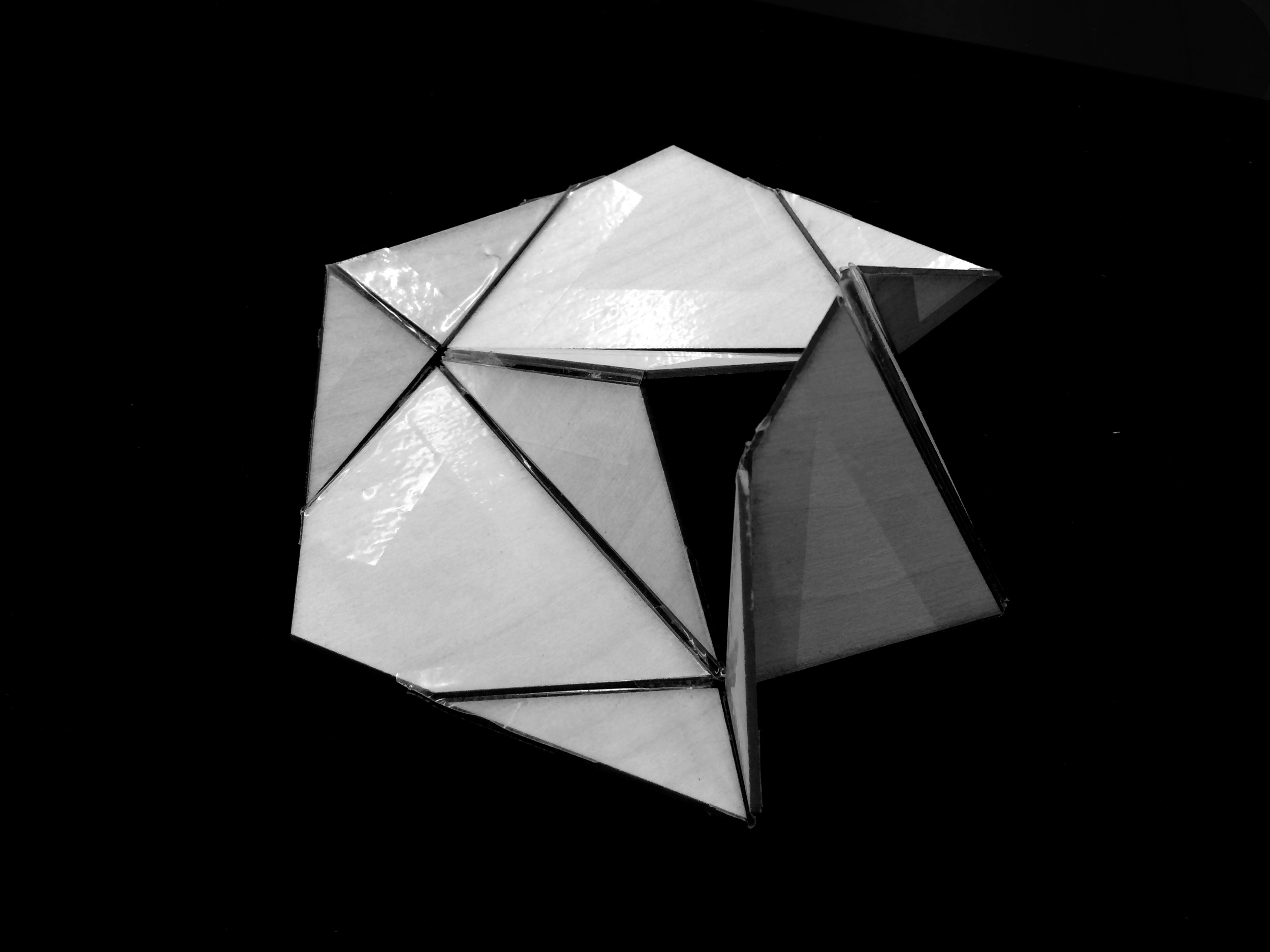
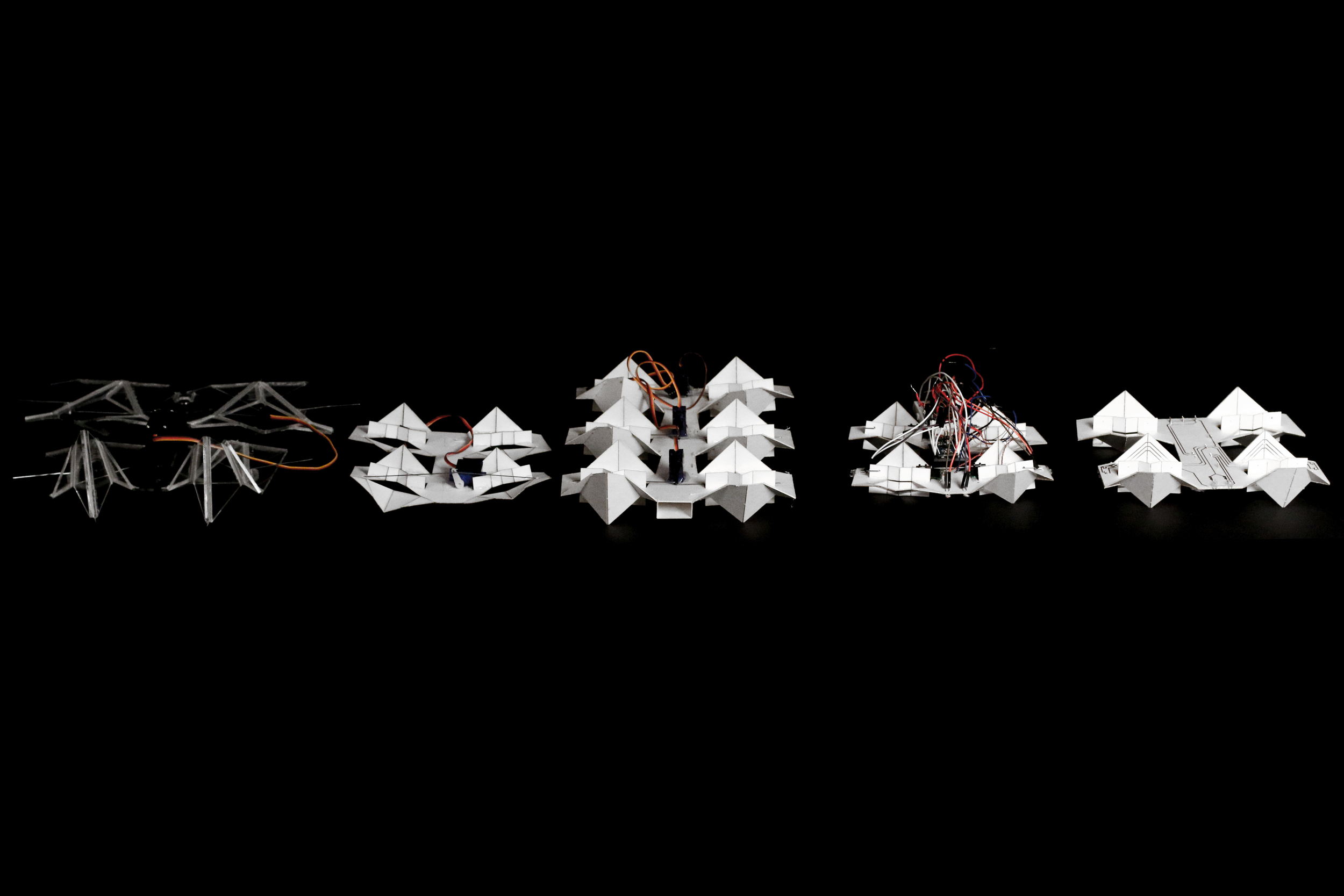
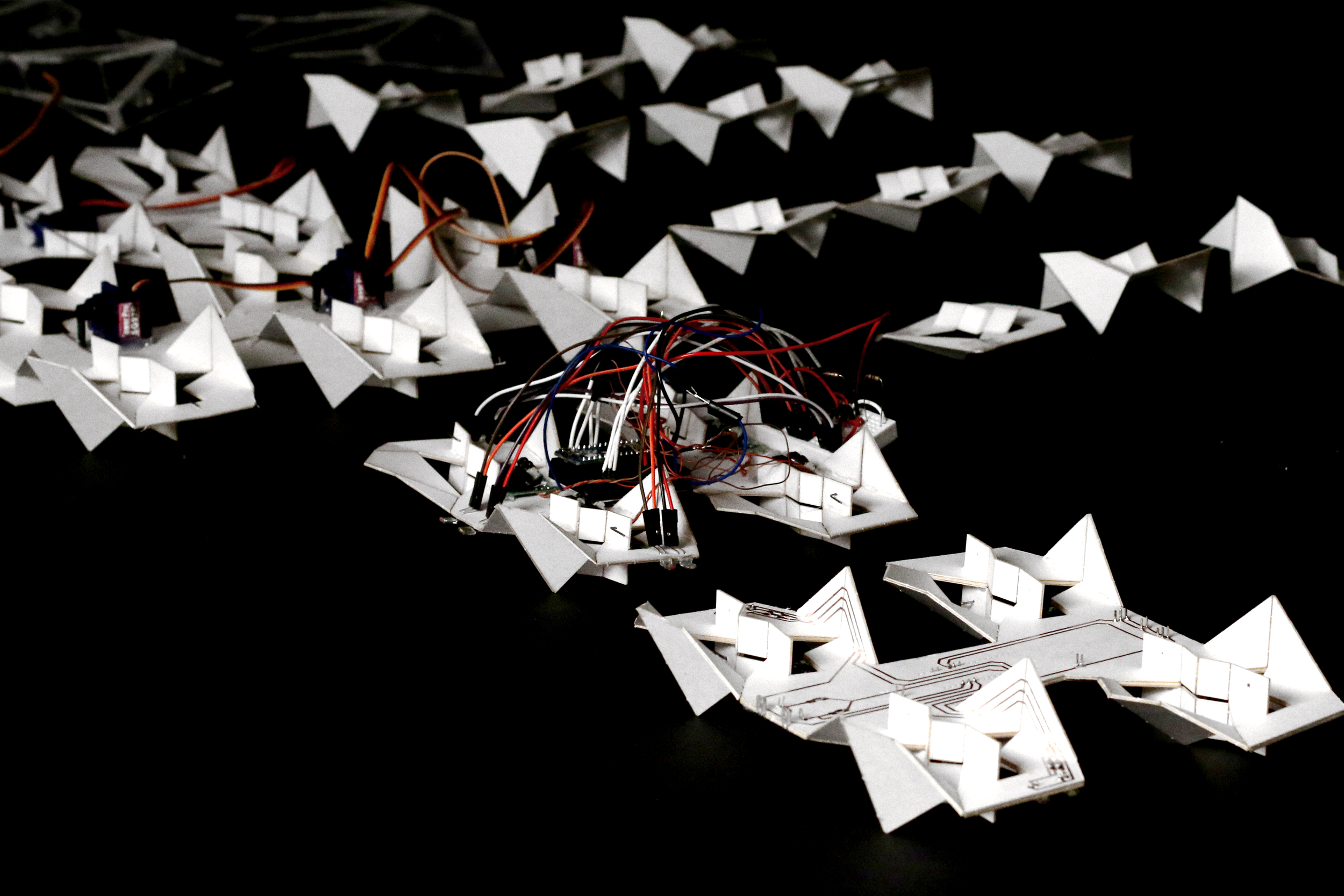
Iterative Design Process -Robot
Design Process - studio

Final Robot Assembly
Body Architecture Iterations
For more information on the research, please visit the Harvard GSD Course Page