HARVARD GSD
F.A.S.T. RobotOrigami-Inspired Robotics for Agile, Low-Cost Mobility
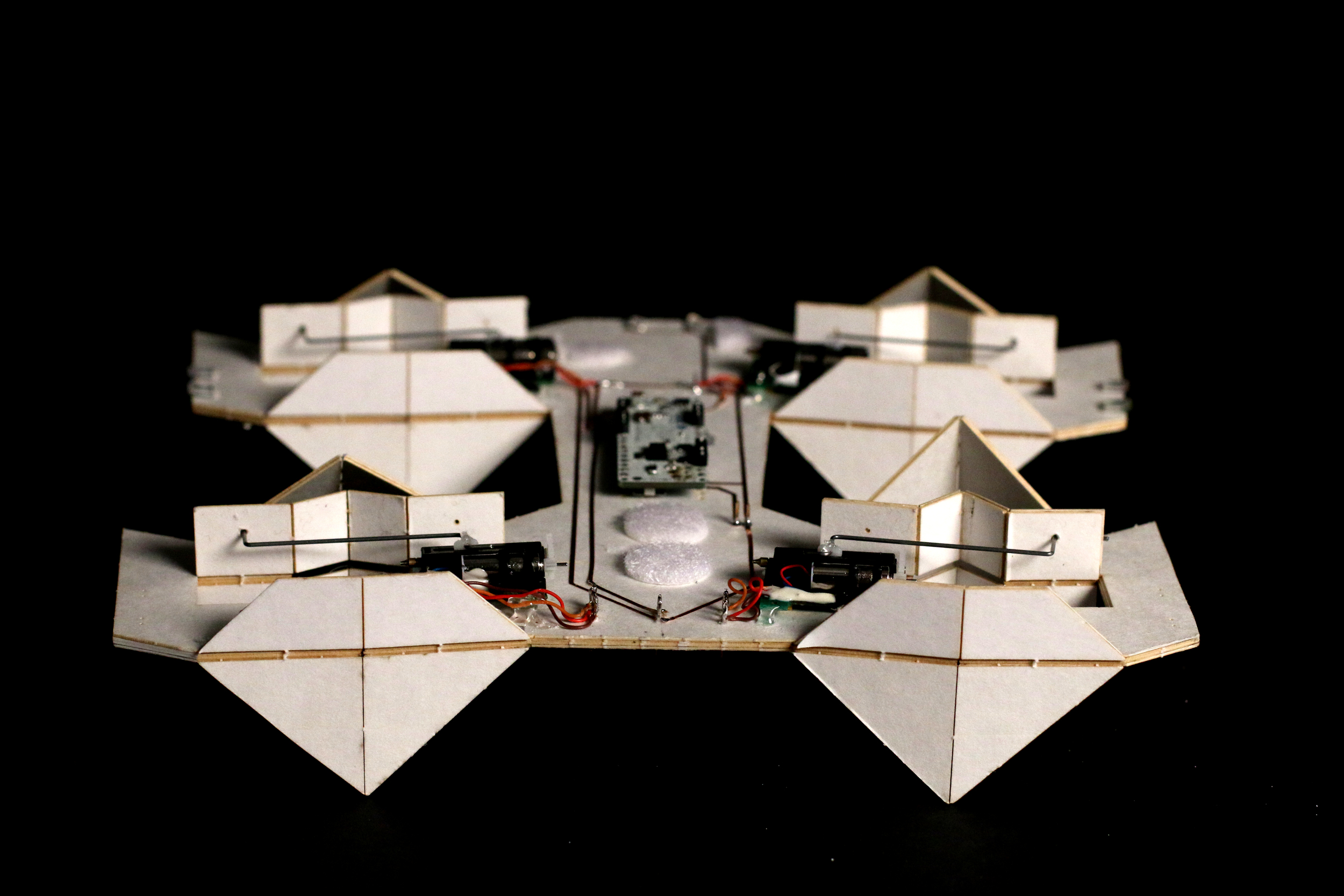
F.A.S.T. (Flat Sheet Actuated Scurrying Tetrapod) is a lightweight, modular walking robot developed at the Harvard Graduate School of Design. It explores how origami-inspired fabrication and lamination techniques can enable rapid, low-cost prototyping of autonomous robotic systems. The robot’s design emphasizes simplicity, agility, and adaptability, making it suitable for various applications in dynamic environments
In collaboration with Spyridon Ampanavos and Jacob Hamman from Chuck Hoberman’s class "Informal Robotics" at the Harvard University Graduate School of Design.
Ambulatory behavior
F.A.S.T. exhibits a “scurrying” gait, reminiscent of small animals or insects, characterized by quick, short steps. This behavior is achieved through a combination of leg design and actuation timing, allowing the robot to navigate complex terrains with agility. The electronics and batteries are housed on the underside of the rigid central body, maintaining a streamlined appearance and enabling potential for further expansion.
Assembly design
The robot’s assembly focuses on reducing actuation complexity while achieving autonomous navigation capabilities. Its movement relies on a gait cycle that leverages static friction during the slow phase and dynamic friction during the fast phase, facilitating forward and backward motion. Turning is accomplished by varying the timing of individual leg movements, allowing for precise directional control.




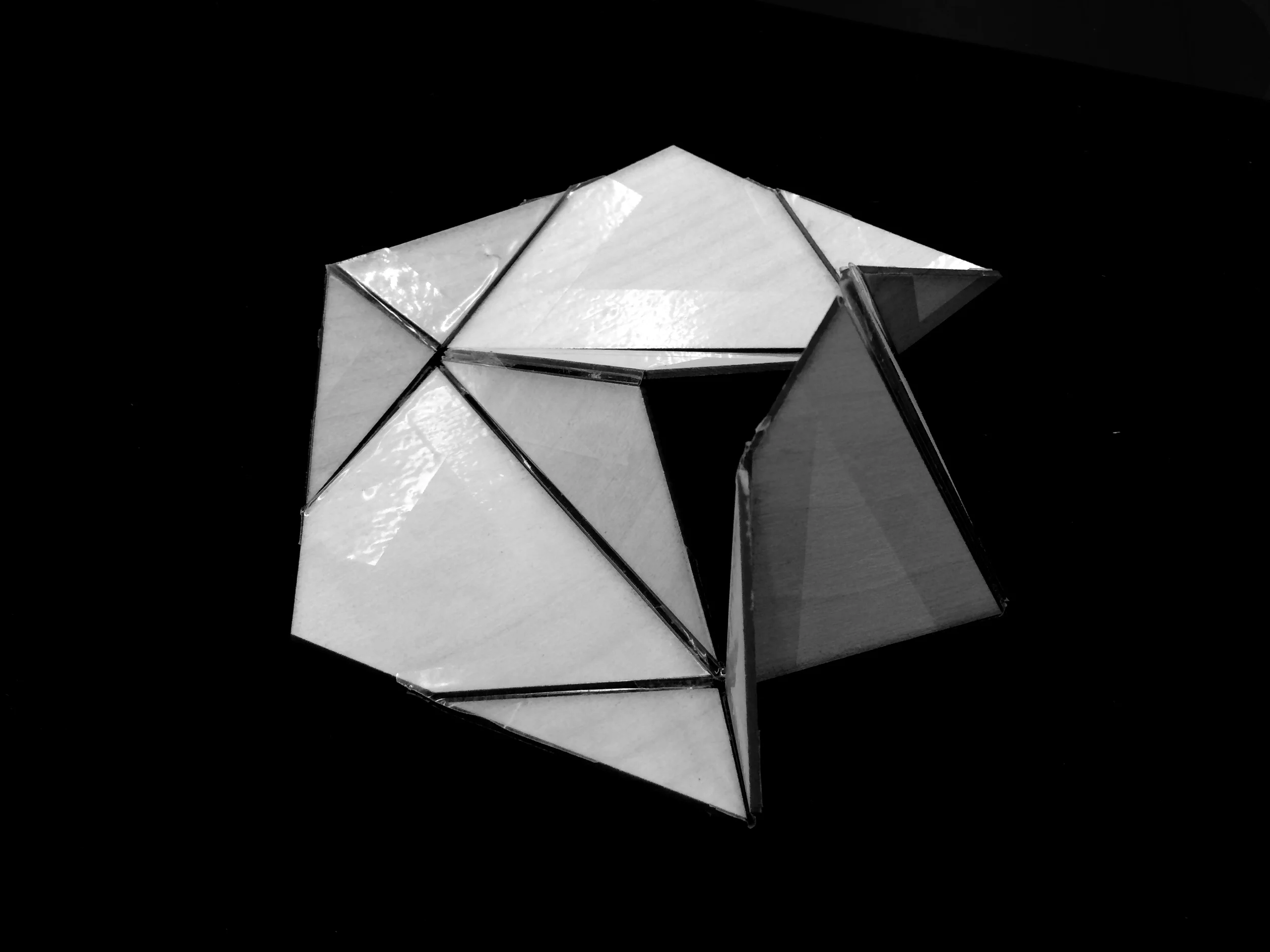
Design iterations
Throughout the project, multiple iterations were conducted to refine form, actuation methods, and material assemblies. Initial prototypes aimed to achieve a successful gait through the folding mechanism. Subsequent iterations experimented with multi-material assemblies to enhance durability and actuation efficiency. Final designs focused on reducing the load of wires and boards by incorporating paper-based electronics and lightweight sensors, further simplifying the robot’s structure and improving performance.









For more information on the research, please visit the Harvard GSD Course Page